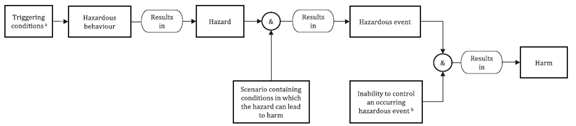
The hazardous event modelling starts by the understanding and the definition of the different function, system specification and design. These include relevant use cases comprised of several scenarios which may contain triggering conditions that may lead to harm. Those triggering conditions include reasonably foreseeable direct misuse (such as the activation of a system outside of the ODD) and reasonably foreseeable indirect misuse (such as the lack of supervision of the automated vehicle driving task by the safety driver).
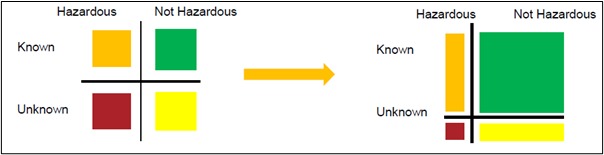
SOTIF defines 4 areas based on two metrics; safety and knowledge of the scenarios leading to harm as illustrated in the figure hereafter.
- Area 1 (known-safe),
- Area 2 (known-unsafe)
- Area 3 (unknown-unsafe) are the most relevant since these can be considered as the trigger for SOTIF enhancement either system based, or human based.
- Area 4 (unknown-safe) is referenced only for completeness.
When considering those areas in the model, it can be useful to imagine their size as representing the proportion of each type of scenario that falls within each respective area. A given use case can include known as well as unknown scenarios.
The goal of the SOTIF activities is to evaluate the SOTIF in these scenarios and to provide a proof that the risk is acceptable by increasing the size of known-safe scenarios proportion while reducing the proportion of unsafe scenarios whether these are known or unknown.
The possible causes of hazard that are considered within the scope of ISO 21448 are those related to.
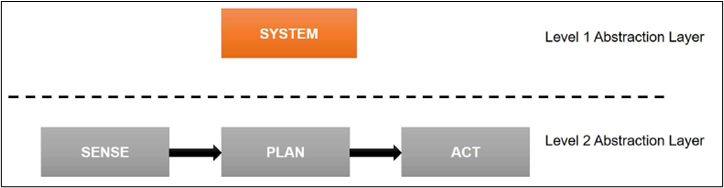
- The sensing capabilities that depict a sufficiently accurate image of the environment in which the automated system is evolving (sensing, perception, ego vehicle localization).
- The reasoning and processing leveraged to take the appropriate decisions (objects recognition, planning safe paths, etc.).
- The ability to derive accurate actions and execute them in a timely manner on the actuation side while ensuring stability.